

インターネット不要の高精度自動操舵へ、ALLYNAVが「QZSS-CLAS」対応ファームウェアをリリース
ALLYNAV AG株式会社は、自動操舵システム「ALLYNAV AF305」向けに、高精度測位を実現するQZSS-CLAS対応の最新ファームウェアを2025年10月下旬にリリースすると発表した。
同バージョンでは、インターネット接続や有料補正サービスは不要で、準天頂衛星「みちびき」から無償で配信されるCLAS補正情報を直接受信することで、より安定した精度と利便性を両立する。
ALLYNAV AG株式会社は、農業用自動操舵システムおよび自律走行技術の開発‧販売を行う企業。中国のALLYNAV本社との技術連携のもと、日本市場向けの独自チューニングやソフトウェア開発を展開している。
「みちびき(QZSS:準天頂衛星システム)」が提供する高精度測位サービス「CLAS(Centimeter LevelAugmentation Service)」は、L6信号を通じて衛星から直接補正情報を配信する。これによりALLYNAV自動操舵システムは、インターネット通信や基地局を必要とせず、衛星を受信できる場所であれば常に安定した補正データを取得することが可能となる。

結果
‧初回測位時間(TTFF):平均20分以内にFix解獲得
‧繰り返し走行誤差:±2.5cm未満(rms)
‧方位角安定性:±0.5°以内
これらの結果は、農業用トラクター自動操舵において、従来のネットワークRTKに匹敵する精度を衛星単独で実現できることを示している。
QZSS L6D CLASの測位精度と安定性を評価する比較試験では、ALLYNAV製CLAS受信機と、他社のCLAS対応モジュールを同一条件下で24時間連続測定し、誤差統計を比較。

その結果、ALLYNAVのCLAS対応受信システムは、他社製CLASモジュールと比較して平均誤差を約30%低減。特に開けた空間下での水平精度では5.1cmを記録し、全天候‧長時間運用でも安定した高精度測位を実現した。
CLAS補正信号を使ったALLYNAV自動操舵システムの「繰り返し線精度」テストでは、農機にCLAS対応ナビゲーション装置を搭載し、基準ライン上で10往復走行した。同時に、NRTK機器でも比較データを取得。その後、ALLYNAV-CLASの走行軌跡を解析して繰り返し線の誤差(どれくらいズレたか)を統計処理した。
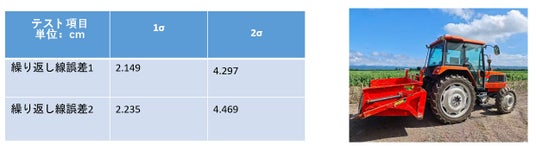
結果、QZSS-CLAS補正情報を使用して、インターネット接続なしでも約±2cmの繰り返し精度を達成。NRTKに依存せず、安定したライン追従を実現することが可能になった。
「直線走行精度」評価試験では、CLAS対応ナビゲーション機器を搭載した農機を使用し、1km/h、5km/h、8km/hの異なる作業速度で直線走行を実施。GPSログデータを収集し、走行のズレと進行方向のブレを分析した。
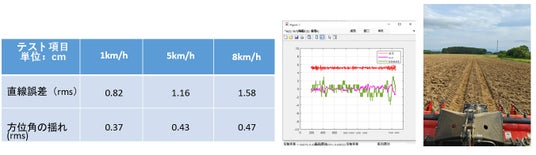
ALLYNAVのCLAS対応自動操舵システムは、衛星補正のみで最大誤差1.5cm未満を実現し、安定した直進性能が確認された。高速走行でもラインからの逸脱が少なく、高精度RTKクラスの直線精度を衛星単独で実現した。
今後ALLYNAVは、QZSS-CLAS対応アンテナの正式販売を開始し、日本各地の農業‧林業ユーザーへの導入を進める。さらに、自動操舵システムだけでなく、自律走行型作業ロボットやインフラ点検などの分野への展開も検討しているという。
ALLYNAV JAPAN / AG株式会社(アリナビ ジャパン / エージー)
https://www.allynav.com
同バージョンでは、インターネット接続や有料補正サービスは不要で、準天頂衛星「みちびき」から無償で配信されるCLAS補正情報を直接受信することで、より安定した精度と利便性を両立する。
「みちびき」が提供する高精度測位サービス「CLAS」を活用
ALLYNAV AG株式会社は、農業用自動操舵システムおよび自律走行技術の開発‧販売を行う企業。中国のALLYNAV本社との技術連携のもと、日本市場向けの独自チューニングやソフトウェア開発を展開している。
「みちびき(QZSS:準天頂衛星システム)」が提供する高精度測位サービス「CLAS(Centimeter LevelAugmentation Service)」は、L6信号を通じて衛星から直接補正情報を配信する。これによりALLYNAV自動操舵システムは、インターネット通信や基地局を必要とせず、衛星を受信できる場所であれば常に安定した補正データを取得することが可能となる。
準天頂衛星「みちびき」から無償で配信されるCLAS補正情報を直接受信し高精度を実現
ALLYNAV AGは、CLASの精度や安定性を確かめるため、東京および北海道中川郡本別町の開けた空間でフィールドテストを実施。NRTK測位結果を真値とし、CLASによる誤差を評価した。
結果
‧初回測位時間(TTFF):平均20分以内にFix解獲得
‧繰り返し走行誤差:±2.5cm未満(rms)
‧方位角安定性:±0.5°以内
これらの結果は、農業用トラクター自動操舵において、従来のネットワークRTKに匹敵する精度を衛星単独で実現できることを示している。
QZSS L6D CLASの測位精度と安定性を評価する比較試験では、ALLYNAV製CLAS受信機と、他社のCLAS対応モジュールを同一条件下で24時間連続測定し、誤差統計を比較。
テスト結果の一部:QZSS L6D CLAS(PPP-RTK方式)の測位精度と安定性を評価する比較試験
その結果、ALLYNAVのCLAS対応受信システムは、他社製CLASモジュールと比較して平均誤差を約30%低減。特に開けた空間下での水平精度では5.1cmを記録し、全天候‧長時間運用でも安定した高精度測位を実現した。
CLAS補正信号を使ったALLYNAV自動操舵システムの「繰り返し線精度」テストでは、農機にCLAS対応ナビゲーション装置を搭載し、基準ライン上で10往復走行した。同時に、NRTK機器でも比較データを取得。その後、ALLYNAV-CLASの走行軌跡を解析して繰り返し線の誤差(どれくらいズレたか)を統計処理した。
テスト結果の一部:CLAS補正信号を使ったALLYNAV自動操舵システムの「繰り返し線精度」テスト結果
結果、QZSS-CLAS補正情報を使用して、インターネット接続なしでも約±2cmの繰り返し精度を達成。NRTKに依存せず、安定したライン追従を実現することが可能になった。
「直線走行精度」評価試験では、CLAS対応ナビゲーション機器を搭載した農機を使用し、1km/h、5km/h、8km/hの異なる作業速度で直線走行を実施。GPSログデータを収集し、走行のズレと進行方向のブレを分析した。
テスト結果の一部:CLAS(QZSS L6D)を利用したALLYNAV自動操舵システムの「直線走行精度」評価試験
ALLYNAVのCLAS対応自動操舵システムは、衛星補正のみで最大誤差1.5cm未満を実現し、安定した直進性能が確認された。高速走行でもラインからの逸脱が少なく、高精度RTKクラスの直線精度を衛星単独で実現した。
今後ALLYNAVは、QZSS-CLAS対応アンテナの正式販売を開始し、日本各地の農業‧林業ユーザーへの導入を進める。さらに、自動操舵システムだけでなく、自律走行型作業ロボットやインフラ点検などの分野への展開も検討しているという。
ALLYNAV JAPAN / AG株式会社(アリナビ ジャパン / エージー)
https://www.allynav.com
-
岡山大学、ウェアラブルカメラで田植え作業を記録 地域農業の暗黙知を可視化
SMART AGRI編集部
-
クロロス、“圃場を歩かずに見る”圃場観察システム「SWALO Eye」を提供開始
SMART AGRI編集部
-
トクイテン、自社農場で「ミニトマト収穫ロボット」の稼働を開始
SMART AGRI編集部
-
鳥獣被害対策の優先順位を可視化するサービス「里カルテ」提供開始
SMART AGRI編集部
-
「第37回ヤンマー学生懸賞論文・作文」募集開始、持続可能な農業の実現に向けたアイデアを募集
SMART AGRI編集部
-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム

-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム



SHARE







































