農研機構、立命館大学、デンソーが無人走行型果実収穫ロボットを開発
農研機構、立命館大学、株式会社デンソーは、V字樹形のリンゴ、ニホンナシ、セイヨウナシなど果樹9品目を対象にした無人走行型果実収穫ロボットのプロトタイプを開発した。
V字樹形とは、樹の形がVの文字に見える樹木の総称を指す。3者は果実収穫ロボットや自動走行車両を活用した無人作業機械を果樹生産現場に導入することで、新規就農者の参入を促進したい考えだ。
 農研機構・立命館大学・株式会社デンソーが開発した無人走行型果実収穫ロボットのプロトタイプ|出典:農研機構
農研機構・立命館大学・株式会社デンソーが開発した無人走行型果実収穫ロボットのプロトタイプ|出典:農研機構
現在、果樹生産地の年齢構成比は60歳代が最多を占め、高齢化が進行している。果樹生産の現場では、少ない人手で産地を維持できる省力生産技術や、若年層が関心を持つような果樹生産技術の開発を強く求めているものの、樹形の複雑さに加え、受粉や摘果、収穫、整枝、剪定など手作業に頼らざるを得ない状況にあることから、新技術開発が難航していた。
これを受け、農研機構が代表を務める「革新的技術開発・緊急展開事業(人工知能未来農業創造プロジェクト:AIプロ)」では、果樹生産地の機械化を推進するための施策として、樹形を可能な限り平面に近づけるV字樹形の列状密植樹形の推進と、V字樹形に対応する無人走行型果実収穫ロボットの研究を進めてきた。
 プロジェクトの概要図|出典:農研機構
プロジェクトの概要図|出典:農研機構
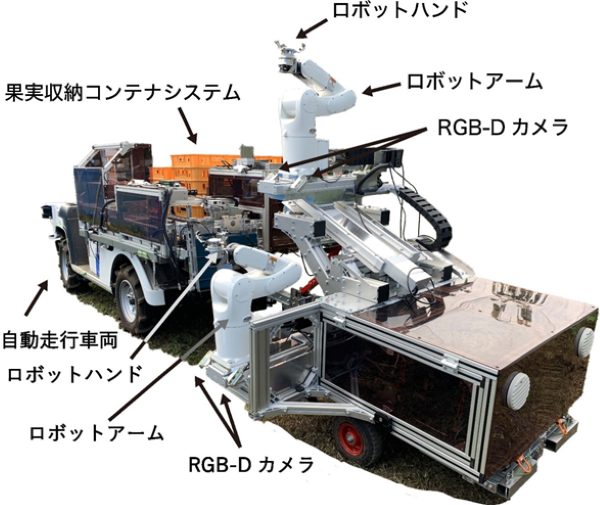
3者が開発した無人走行型果実収穫ロボットは、自動走行車両を活用した牽引型の収穫ロボットだ。2本のアームが果実の収穫を行う仕組みで、収穫した果実は荷台に設置した果実収納コンテナシステムに送られる。コンテナの交換も自動で、人間と同等速度の収穫スピード(11秒/個)を実現している。
 出典:農研機構
出典:農研機構
開発に至る研究では、デンソーが収穫ロボットのハード開発を、立命館大学が果実認識、収穫時期判定等のソフト開発を担当した。
ハード開発では、果実を傷つけずに収穫する仕組みとして、3つの爪で構成された果実を把持するためのハンドを研究。果実を傷つけない程度の把持力で保持しつつ、ハンドの回転を利用して収穫する機構の開発に成功した。
ソフト開発では果実の認識、収穫時期の判断、着果位置の把握が必要であることから、可視画像撮影と距離計測が可能なRGB-Dカメラの可視画像を用いたディープラーニングによる人工知能手法を活用。その結果、果実認識およびニホンナシの熟度判断について、日中・夜間を問わず90%以上の精度が得られたという。
 ディープラーニングによる果実認識(ニホンナシV字樹形)|出典:農研機構
ディープラーニングによる果実認識(ニホンナシV字樹形)|出典:農研機構
収穫速度については、人間と同程度以上のスピードを実現するために2本の収穫アームを採用。アーム同士の接触を防ぐマニピュレータ・ハンドシステムが互いの軌道を理解して、軌道計画を実行するアルゴリズムの構築にも成功した。収穫後の自動移動については、「自動収穫ロボットに取り付けられたカメラ画像および距離画像が、次に収穫する枝の果実を認識して車両の移動量を指示する」としている。
3者は、市販化に向けた取り組みとして、「現地実証試験の継続で安定性や正確性を向上させながら安全に利用できる仕組み作りが必要」とした上で、収穫物の自動積み下ろし機能など周辺技術の開発も示唆している。
今後も研究・開発を継続し、次世代の後継者である若者に魅力ある果樹生産技術を提示したい考えだ。
農研機構
http://www.naro.affrc.go.jp/
立命館大学
http://www.ritsumei.ac.jp/
株式会社デンソー
https://www.denso.com/jp/ja/
V字樹形とは、樹の形がVの文字に見える樹木の総称を指す。3者は果実収穫ロボットや自動走行車両を活用した無人作業機械を果樹生産現場に導入することで、新規就農者の参入を促進したい考えだ。
農研機構・立命館大学・株式会社デンソーが開発した無人走行型果実収穫ロボットのプロトタイプ|出典:農研機構現在、果樹生産地の年齢構成比は60歳代が最多を占め、高齢化が進行している。果樹生産の現場では、少ない人手で産地を維持できる省力生産技術や、若年層が関心を持つような果樹生産技術の開発を強く求めているものの、樹形の複雑さに加え、受粉や摘果、収穫、整枝、剪定など手作業に頼らざるを得ない状況にあることから、新技術開発が難航していた。
これを受け、農研機構が代表を務める「革新的技術開発・緊急展開事業(人工知能未来農業創造プロジェクト:AIプロ)」では、果樹生産地の機械化を推進するための施策として、樹形を可能な限り平面に近づけるV字樹形の列状密植樹形の推進と、V字樹形に対応する無人走行型果実収穫ロボットの研究を進めてきた。
プロジェクトの概要図|出典:農研機構人間と同等速度の収穫スピードを実現した果実収穫ロボット
3者が開発した無人走行型果実収穫ロボットは、自動走行車両を活用した牽引型の収穫ロボットだ。2本のアームが果実の収穫を行う仕組みで、収穫した果実は荷台に設置した果実収納コンテナシステムに送られる。コンテナの交換も自動で、人間と同等速度の収穫スピード(11秒/個)を実現している。
出典:農研機構開発に至る研究では、デンソーが収穫ロボットのハード開発を、立命館大学が果実認識、収穫時期判定等のソフト開発を担当した。
ハード開発では、果実を傷つけずに収穫する仕組みとして、3つの爪で構成された果実を把持するためのハンドを研究。果実を傷つけない程度の把持力で保持しつつ、ハンドの回転を利用して収穫する機構の開発に成功した。
ソフト開発では果実の認識、収穫時期の判断、着果位置の把握が必要であることから、可視画像撮影と距離計測が可能なRGB-Dカメラの可視画像を用いたディープラーニングによる人工知能手法を活用。その結果、果実認識およびニホンナシの熟度判断について、日中・夜間を問わず90%以上の精度が得られたという。
ディープラーニングによる果実認識(ニホンナシV字樹形)|出典:農研機構収穫速度については、人間と同程度以上のスピードを実現するために2本の収穫アームを採用。アーム同士の接触を防ぐマニピュレータ・ハンドシステムが互いの軌道を理解して、軌道計画を実行するアルゴリズムの構築にも成功した。収穫後の自動移動については、「自動収穫ロボットに取り付けられたカメラ画像および距離画像が、次に収穫する枝の果実を認識して車両の移動量を指示する」としている。
3者は、市販化に向けた取り組みとして、「現地実証試験の継続で安定性や正確性を向上させながら安全に利用できる仕組み作りが必要」とした上で、収穫物の自動積み下ろし機能など周辺技術の開発も示唆している。
今後も研究・開発を継続し、次世代の後継者である若者に魅力ある果樹生産技術を提示したい考えだ。
農研機構
http://www.naro.affrc.go.jp/
立命館大学
http://www.ritsumei.ac.jp/
株式会社デンソー
https://www.denso.com/jp/ja/
-
トクイテン、自社農場で「ミニトマト収穫ロボット」の稼働を開始
SMART AGRI編集部
-
農水省「令和7年度食育白書」公表、食育基本法のあゆみや取り組み事例を紹介
SMART AGRI編集部
-
岡山大学、ウェアラブルカメラで田植え作業を記録 地域農業の暗黙知を可視化
SMART AGRI編集部
-
クロロス、“圃場を歩かずに見る”圃場観察システム「SWALO Eye」を提供開始
SMART AGRI編集部
-
鳥獣被害対策の優先順位を可視化するサービス「里カルテ」提供開始
SMART AGRI編集部
-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム

-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム


SHARE