

NTTグループ、遠隔収穫ロボットで400km離れた場所のいちご収穫に成功
日本電信電話株式会社(以下、NTT)、東日本電信電話株式会社(以下、NTT東日本)、株式会社NTTアグリテクノロジー(以下、NTTアグリテクノロジー)の3社は、圃場にある収穫ロボットをネットワーク越しに遠隔操作し、秋田-東京間直線距離約400km離れた場所のいちごを収穫する実証実験を行った。通信品質の変動にも高い操作性を維持し、いちごの収穫に成功した。
日本の農業は担い手の減少や高齢化などに伴う労働力の不足に直面しており、その解決策としてスマート農業技術の導入が進んでいる。しかし、農作業の多くは依然として人手に頼っており、農業用ロボットによって農作業の稼働を削減することが求められている。
特に、植物を扱う農業では、収穫や農薬散布などの作業を一律に自動化することが難しく、人の判断を伴う遠隔操作ロボットの活用が重要となる。今回行われた実証では、農作業支援者が遠隔地から収穫作業を行うことを想定し、操作性に優れた収穫ロボットの遠隔操作実証を実施した。
遠隔操作の実用化には、操作性の向上や収穫判断をするために、ネットワーク遅延などの不可視情報を画像処理により可視化することが有効とされている。また、遠隔操作を広く普及させるためには、遠隔操作に欠かせないネットワークやサーバ処理の低遅延化だけでなく、万が一、高負荷状態により遅延が大きくなってしまった場合にも操作性を低下させない仕組みが必要だという。
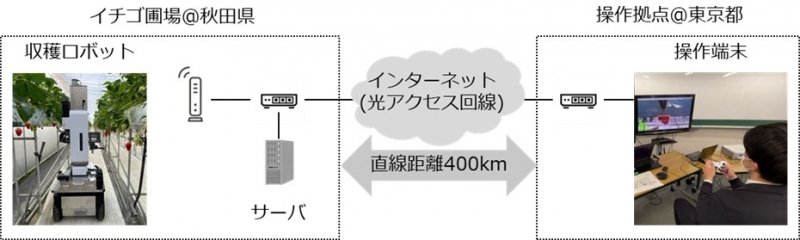
実証では、東京都の収穫ロボット操作者がネットワークを通じて伝送されたカメラ映像を見ながら、秋田県の圃場にあるいちごを収穫するロボットを遠隔操作する環境が構築された。
収穫ロボットのカメラが撮影した映像をもとに、画像処理用サーバでいちごの収穫適否を判定し、その結果を映像に追加。操作者はモニタに表示された収穫適否の情報が表示される映像を見て、ロボットを遠隔操作して秋田にあるいちごを収穫する。
システム構成として、秋田県のいちご圃場に収穫ロボットと画像処理用サーバを設置し、東京都の拠点に操作端末を配置。拠点は直線距離で約400km離れており、光アクセス回線とインターネット回線で接続されている。この環境において、収穫ロボットを遠隔から精度高く操作し、いちごを傷つけずに収穫できることを確認した。
さらに、同システムにモニタの表示情報とロボットアームの速度をエンドツーエンドの遅延時間に応じて変更する機能を実装し、この機能がいちごの収穫作業の操作性をどの程度向上させたのかを検証。
ロボットアームを1回の操作で正確に移動できた割合を測定した結果、遅延が変動する環境では成功率が約50%であったが、同機能を活用することで成功率は約80%に向上し、約30%の改善が確認された。また、被験者の5名全員が同機能による操作性の改善を実感したと評価した。
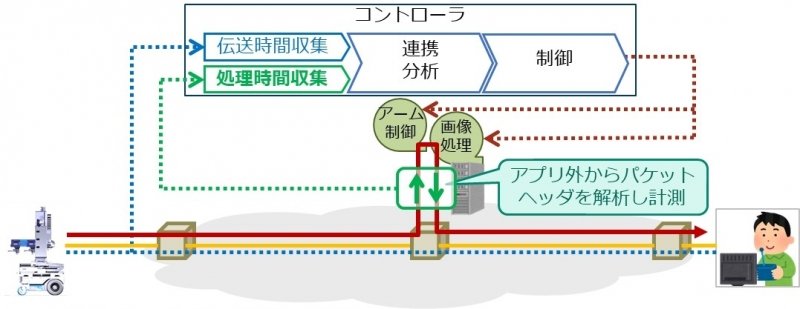
今回採用された「ネットワークコンピュート高速クローズドループ制御技術」は、エッジサーバでの処理時間とネットワークの遅延時間をリアルタイムに状態把握し、エンドツーエンドでの遅延時間が性能要件を満たさなくなる場合に別の経路および別のサーバ処理に即座に切り替えることで安定した低遅延サービスを提供する技術だ。同技術の高度化を図り、スマート農業に適用可能な機能を付加したという。
従来は、画像処理アプリに独自機能を追加し、その機能を用いてアプリと連携することで、画像処理時間を計測していた。機能を高度化したことで、アプリ外から入出力データを汎用画像フレームのヘッダ特性を用いて解析し、データの通過時間から処理時間の計算が可能となった。これにより、画像処理アプリに手を加えなくても、アプリ外のサーバのみで処理時間計測を行えるようになる。
また、これまでは通信品質が性能要件を満たさない場合、別の経路やサーバ処理に切り替える制御を行っていたという。より汎用的な使い方として、通信品質の状態をリアルタイムに遠隔収穫システムに通知し、システム側で制御を行うようにした。
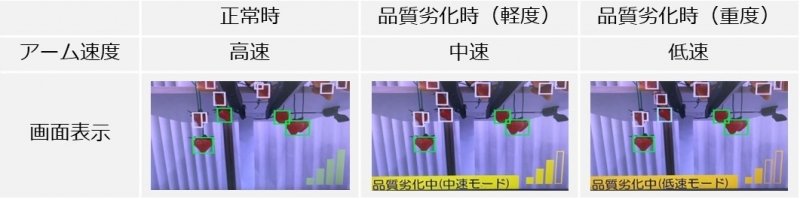
この機能では、通信品質を分析し、それを3段階に分類してから遠隔収穫システムへの通知を行う。遠隔収穫システムは、ロボットから操作端末に流れる映像に通信品質を表示し、操作者にタイムリーに通知する。
ロボットアームを制御する情報に対して通信品質に応じた速度制御を行い、アームを減速または停止させることもできる。これにより、エンドツーエンドでの遅延時間が長くなった場合でも、操作者はその状況を把握し、操作上のストレスを軽減することが可能だ。
さらに、遅延時間が長くなると操作精度が低下するが、アームの速度を調整することで、その誤差を軽減することもできるという。
今回の実証における各社の役割は以下のとおり。
NTT
ネットワークコンピュート高速クローズドループ制御技術の実装と、遠隔操作における同技術の有用性を検証
NTT東日本
ICTを活用した遠隔営農支援システムのビジネス化の検討、実証における通信環境の提供
NTTアグリテクノロジー
農業フィールドの提供と、ロボットを用いたスマート農業の有用性検証
3社は、人とロボットが融合した農業の実現に向け、実証実験の成果の実用化に向けて取り組んでいく。また、農業分野以外にも活用できるネットワークコンピュート高速クローズドループ制御技術の実用化・汎用化を推進していくとしている。
日本電信電話株式会社
https://group.ntt/jp/
東日本電信電話株式会社
https://www.ntt-east.co.jp/
株式会社NTTアグリテクノロジー
https://www.ntt-agritechnology.com/
遠隔収穫システム構成図
約400km離れた場所からいちごの収穫に成功
日本の農業は担い手の減少や高齢化などに伴う労働力の不足に直面しており、その解決策としてスマート農業技術の導入が進んでいる。しかし、農作業の多くは依然として人手に頼っており、農業用ロボットによって農作業の稼働を削減することが求められている。
特に、植物を扱う農業では、収穫や農薬散布などの作業を一律に自動化することが難しく、人の判断を伴う遠隔操作ロボットの活用が重要となる。今回行われた実証では、農作業支援者が遠隔地から収穫作業を行うことを想定し、操作性に優れた収穫ロボットの遠隔操作実証を実施した。
遠隔操作の実用化には、操作性の向上や収穫判断をするために、ネットワーク遅延などの不可視情報を画像処理により可視化することが有効とされている。また、遠隔操作を広く普及させるためには、遠隔操作に欠かせないネットワークやサーバ処理の低遅延化だけでなく、万が一、高負荷状態により遅延が大きくなってしまった場合にも操作性を低下させない仕組みが必要だという。
実証では、東京都の収穫ロボット操作者がネットワークを通じて伝送されたカメラ映像を見ながら、秋田県の圃場にあるいちごを収穫するロボットを遠隔操作する環境が構築された。
収穫ロボットのカメラが撮影した映像をもとに、画像処理用サーバでいちごの収穫適否を判定し、その結果を映像に追加。操作者はモニタに表示された収穫適否の情報が表示される映像を見て、ロボットを遠隔操作して秋田にあるいちごを収穫する。
システム構成として、秋田県のいちご圃場に収穫ロボットと画像処理用サーバを設置し、東京都の拠点に操作端末を配置。拠点は直線距離で約400km離れており、光アクセス回線とインターネット回線で接続されている。この環境において、収穫ロボットを遠隔から精度高く操作し、いちごを傷つけずに収穫できることを確認した。
さらに、同システムにモニタの表示情報とロボットアームの速度をエンドツーエンドの遅延時間に応じて変更する機能を実装し、この機能がいちごの収穫作業の操作性をどの程度向上させたのかを検証。
ロボットアームを1回の操作で正確に移動できた割合を測定した結果、遅延が変動する環境では成功率が約50%であったが、同機能を活用することで成功率は約80%に向上し、約30%の改善が確認された。また、被験者の5名全員が同機能による操作性の改善を実感したと評価した。
今回採用された「ネットワークコンピュート高速クローズドループ制御技術」は、エッジサーバでの処理時間とネットワークの遅延時間をリアルタイムに状態把握し、エンドツーエンドでの遅延時間が性能要件を満たさなくなる場合に別の経路および別のサーバ処理に即座に切り替えることで安定した低遅延サービスを提供する技術だ。同技術の高度化を図り、スマート農業に適用可能な機能を付加したという。
従来は、画像処理アプリに独自機能を追加し、その機能を用いてアプリと連携することで、画像処理時間を計測していた。機能を高度化したことで、アプリ外から入出力データを汎用画像フレームのヘッダ特性を用いて解析し、データの通過時間から処理時間の計算が可能となった。これにより、画像処理アプリに手を加えなくても、アプリ外のサーバのみで処理時間計測を行えるようになる。
システム連携機能
また、これまでは通信品質が性能要件を満たさない場合、別の経路やサーバ処理に切り替える制御を行っていたという。より汎用的な使い方として、通信品質の状態をリアルタイムに遠隔収穫システムに通知し、システム側で制御を行うようにした。
この機能では、通信品質を分析し、それを3段階に分類してから遠隔収穫システムへの通知を行う。遠隔収穫システムは、ロボットから操作端末に流れる映像に通信品質を表示し、操作者にタイムリーに通知する。
ロボットアームを制御する情報に対して通信品質に応じた速度制御を行い、アームを減速または停止させることもできる。これにより、エンドツーエンドでの遅延時間が長くなった場合でも、操作者はその状況を把握し、操作上のストレスを軽減することが可能だ。
さらに、遅延時間が長くなると操作精度が低下するが、アームの速度を調整することで、その誤差を軽減することもできるという。
システム連携機能
今回の実証における各社の役割は以下のとおり。
NTT
ネットワークコンピュート高速クローズドループ制御技術の実装と、遠隔操作における同技術の有用性を検証
NTT東日本
ICTを活用した遠隔営農支援システムのビジネス化の検討、実証における通信環境の提供
NTTアグリテクノロジー
農業フィールドの提供と、ロボットを用いたスマート農業の有用性検証
3社は、人とロボットが融合した農業の実現に向け、実証実験の成果の実用化に向けて取り組んでいく。また、農業分野以外にも活用できるネットワークコンピュート高速クローズドループ制御技術の実用化・汎用化を推進していくとしている。
日本電信電話株式会社
https://group.ntt/jp/
東日本電信電話株式会社
https://www.ntt-east.co.jp/
株式会社NTTアグリテクノロジー
https://www.ntt-agritechnology.com/
-
トクイテン、自社農場で「ミニトマト収穫ロボット」の稼働を開始
SMART AGRI編集部
-
NTTアグリテクノロジー、台湾における「遠隔営農支援システム」の実証結果を報告
SMART AGRI編集部
-
スマート農業向けサーバーレス推論サービス「Catalyst」提供開始
SMART AGRI編集部
-
岡山大学、ウェアラブルカメラで田植え作業を記録 地域農業の暗黙知を可視化
SMART AGRI編集部
-
クロロス、“圃場を歩かずに見る”圃場観察システム「SWALO Eye」を提供開始
SMART AGRI編集部
-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム

-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム



SHARE







































