

岡山大学、AIを活用した果物・野菜収穫用空間センサーの開発に成功
国立大学法人岡山大学と岡山大学発のベンチャー企業である株式会社ビジュアルサーボは、AIを用いた果物・野菜収穫用空間センサーの開発に成功した。これにより、照度等の周辺環境の変化に影響されずに位置・寸法計測が可能になる。
岡山大学とビジュアルサーボは、ステレオビジョンを用いた空間計測の研究を続け、任意対象物の3次元位置姿勢を計測するコンピュータビジョンの構築に成功し、泳ぐ魚の寸法計測などを行ってきた。この画像計測方法は、左右複眼カメラに同じ対象物が写っていれば、その位置・姿勢・寸法の計測が可能であるという特徴があり、このアイデアはビジュアルサーボ所有の特許(特許番号:6784991・6760656)で権利化されている。
今回、AI手法を用いた画像処理方法により、野菜や果物などの任意不定形対象物でも、位置・寸法の計測が可能となった。
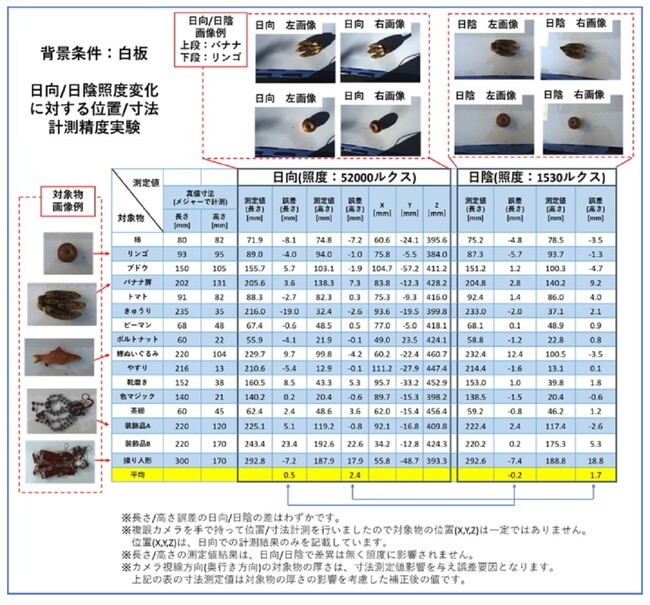
農業用ロボットは、屋外の光環境が変化しても計測結果が変化しない計測特性が求められている。研究では、野菜・果物・日用品を16種用意して寸法を実測するとともに、屋外の日向(照度約5万2000ルクス)および日陰(1530ルクス)の光環境で対象物の寸法と3次元位置を計測し、日向と日陰の照度差に影響されない位置・寸法の計測を実証。
その結果、「果物・野菜・日用品の寸法と3次元位置を屋外で接触せずに空間計測が可能なこと」、「寸法計測結果は、屋外の日向・日陰の照度環境に影響されないこと」、「補正後の寸法平均誤差は1[mm]以下、標準偏差は3[mm]程度であること」の3つが判明。照度等の周辺環境の変化に影響されずに位置・寸法計測が可能となった。
計測装置を小型化することで、移動ロボットのハンド部への取り付けが可能となり、ロボットの動きによってカメラ視点を野菜・果物などの対象物の近くに移動させて計測できることから、農作物を正確に把持・収穫する農業用ロボットの開発に貢献できるという。
今後は、株式会社SECと果物・野菜収穫用ロボットの開発を共同で進めるとともに、収穫時に果物の熟度などの計測・寸法に基づく仕分け作業なども可能な多機能ロボットの開発を進め、2023年度中には農場でのフィールドテストを開始する方針を示している。
 農業用ロボット搭載用の複眼ハンドアイカメラ。
農業用ロボット搭載用の複眼ハンドアイカメラ。
国立大学法人岡山大学
https://www.okayama-u.ac.jp/
株式会社ビジュアルサーボ
https://visual-servo.com/
株式会社SEC
https://www.sec2012.co.jp/
農業用ロボットの開発に貢献
岡山大学とビジュアルサーボは、ステレオビジョンを用いた空間計測の研究を続け、任意対象物の3次元位置姿勢を計測するコンピュータビジョンの構築に成功し、泳ぐ魚の寸法計測などを行ってきた。この画像計測方法は、左右複眼カメラに同じ対象物が写っていれば、その位置・姿勢・寸法の計測が可能であるという特徴があり、このアイデアはビジュアルサーボ所有の特許(特許番号:6784991・6760656)で権利化されている。
今回、AI手法を用いた画像処理方法により、野菜や果物などの任意不定形対象物でも、位置・寸法の計測が可能となった。
農業用ロボットは、屋外の光環境が変化しても計測結果が変化しない計測特性が求められている。研究では、野菜・果物・日用品を16種用意して寸法を実測するとともに、屋外の日向(照度約5万2000ルクス)および日陰(1530ルクス)の光環境で対象物の寸法と3次元位置を計測し、日向と日陰の照度差に影響されない位置・寸法の計測を実証。
その結果、「果物・野菜・日用品の寸法と3次元位置を屋外で接触せずに空間計測が可能なこと」、「寸法計測結果は、屋外の日向・日陰の照度環境に影響されないこと」、「補正後の寸法平均誤差は1[mm]以下、標準偏差は3[mm]程度であること」の3つが判明。照度等の周辺環境の変化に影響されずに位置・寸法計測が可能となった。
計測装置を小型化することで、移動ロボットのハンド部への取り付けが可能となり、ロボットの動きによってカメラ視点を野菜・果物などの対象物の近くに移動させて計測できることから、農作物を正確に把持・収穫する農業用ロボットの開発に貢献できるという。
今後は、株式会社SECと果物・野菜収穫用ロボットの開発を共同で進めるとともに、収穫時に果物の熟度などの計測・寸法に基づく仕分け作業なども可能な多機能ロボットの開発を進め、2023年度中には農場でのフィールドテストを開始する方針を示している。
農業用ロボット搭載用の複眼ハンドアイカメラ。カメラ部から対象物までの位置の寸法を測定し、その結果をもとに対象物にハンド部を接近させ、把持・収穫する。
また、計測と接近を繰り返すことで、至近距離からの計測が可能となる
また、計測と接近を繰り返すことで、至近距離からの計測が可能となる
実測した寸法と日向および日陰での3次元位置測定の結果。測定結果は照度環境の影響を受けていない
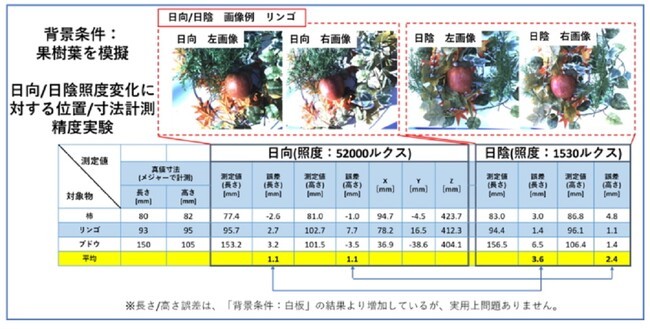
果樹葉を模擬した背景条件での、実寸と日向および日陰での3次元位置測定の結果。
果物が果樹の葉に囲まれた状態で背景が複雑な状態であっても、
誤差はわずかであり、位置・寸法の計測が可能であることを示している
誤差はわずかであり、位置・寸法の計測が可能であることを示している
国立大学法人岡山大学
https://www.okayama-u.ac.jp/
株式会社ビジュアルサーボ
https://visual-servo.com/
株式会社SEC
https://www.sec2012.co.jp/
-
岡山大学、ウェアラブルカメラで田植え作業を記録 地域農業の暗黙知を可視化
SMART AGRI編集部
-
トクイテン、自社農場で「ミニトマト収穫ロボット」の稼働を開始
SMART AGRI編集部
-
スマート農業向けサーバーレス推論サービス「Catalyst」提供開始
SMART AGRI編集部
-
農水省「令和7年度食育白書」公表、食育基本法のあゆみや取り組み事例を紹介
SMART AGRI編集部
-
クロロス、“圃場を歩かずに見る”圃場観察システム「SWALO Eye」を提供開始
SMART AGRI編集部
-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム

-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム



SHARE






































