

農機の無人化に向けた現状と課題 ~クボタ・飯田聡特別技術顧問に聞く【第3回】
農林水産省は、2020年までに遠隔監視での農機の無人システムを実現すると宣言。それに向けた開発状況や課題について、前回に引き続き、農機メーカー最大手クボタの飯田聡 特別技術顧問に聞いた。
<これまでの連載はこちら>
クボタが描くスマート農業の未来<上>「目指すはPDCA型農業」〜飯田聡特別技術顧問に聞くクボタが描くスマート農業の未来<中>「最終目標は高度営農支援システムの構築」〜飯田聡特別技術顧問に聞く
 株式会社クボタ 特別技術顧問の飯田聡氏
株式会社クボタ 特別技術顧問の飯田聡氏
――農林水産省は2020年までに遠隔監視での完全無人システム(レベル3)を実現すると宣言しています。2年後ですが、実現に当たってどんな課題がありますか。
飯田:まず言いたいのは、完全無人化の定義をはっきりしなければいけないということ。無人化の対象に圃場間移動をするための公道走行を含むのか、専用の農道に限定するのかでメーカーにとっては開発の難易度がものすごく違ってくるんです。
もう一つ重要なのは、遠隔監視とはどんな形態なのかということ。たとえば10km四方に田んぼが点在しているとして、すべてを農家の事務所のモニターで監視するのか、それとも1km範囲内で隣接する圃場を移動型監視車両で遠隔監視するのか? どちらを指すかで開発の難易度も違うんですよ。
――遠隔監視するためには通信の問題も残っていますね。
飯田:ええ、たとえば2.4GHzのWi-Fiは200m程度しか電波を飛ばせない。広範囲の遠隔監視をするためには農村で大量かつ高速にデータを流すインフラ(5Gなど)が必要になりますし、今の電波法の規制緩和も必要になるかもしれません。
それから道路走行も厄介な問題です。車の自動運転や安全運転支援システムに必要となる高精度の3次元情報を持つデジタル地図を「ダイナミックマップ」と呼んでいますが、そういう情報を取り込みながら道路走行する、自動車の無人走行技術が必要になります。
また、トラクターの作業機械を装着しての道路走行は法的に禁じられています。こうした法的規制が緩和されたり技術的な課題が克服できないと、2020年に無人化するといっても、その範囲はかなり限定的になるでしょう。
資料提供:株式会社クボタ
――無人化の定義があいまいで、なおかつ障害も多い中、御社としてロボット農機の開発はどこまで進めていますか。
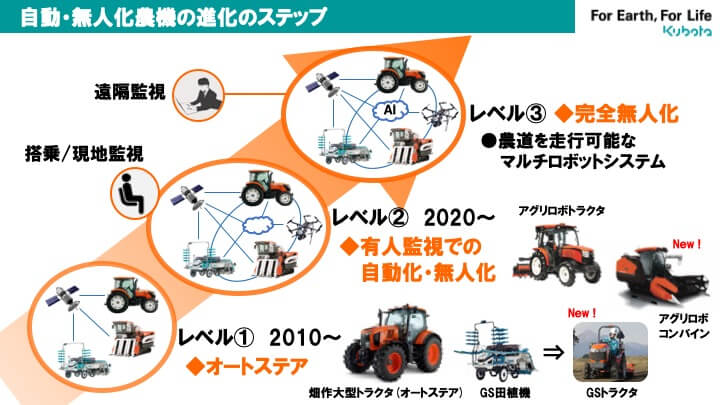
飯田:農水省は農機の無人化・自動化のレベルを3段階に分けています。レベル1に相当するオートステアリング(自動操舵)では、すでに直進機能付きの田植機やトラクターを普及させています。現在は、レベル2の有人監視の下での無人化や自動化の実現に向けて、トラクター・田植機・コンバインなどを活用した周年作業の自動化を目指して研究開発を進めています。
その第1弾として2017年6月から、「アグリロボトラクタ」をモニター販売しました。このトラクターは単独での無人走行のみならず、2台での協調運転ができるようになっています。さらに、このトラクターには安全機能を備えさせ、レーザースキャナーやソナーなどで障害物を感知し停止するようにしました。これは農水省の「農業機械の自動走行に関する安全性確保ガイドライン」や策定中のISO基準に沿っています。
ただ、これはある程度の平地で作業することを前提にしているんですね。畑作だとかなりの傾斜地で作業することもあり、作業機は色々な種類があってその形態が複雑。そうした様々な状況に対応できるようにするには、さらに時間をかけていかなければなりません。

資料提供:株式会社クボタ
もう一つ、アグリロボトラクタについては、「効率がどれくらい上がったか」と聞かれることがあります。もちろん効率は大事なんですが、とにかく働き手がおらず農繁期の忙しい時に、農家のみなさんの働き方改革に役立つというのが大きいです。就農したばかりの人がすぐにトラクターを使いこなせ、農業に対する希望をもってもらえる点にも目を向けて欲しいです。ですから、当面私どもはレベル2の農機の開発と普及に力を入れていきたいと思います。
――2018年11月に運用開始が決まっている日本発の衛星利用システム「準天頂衛星」についてはどう思われますか。
飯田:現時点で既存のRTK-GNSSと比べるとやや精度が下がると言われています。それなら作業にどのくらい影響するのか。大きく影響するのであれば、補完的な技術を考えないといけない。価格について言えば、衛星から補正信号をもらうので、RTK-GNSSと違って基地局を立てる必要がない分、安価にもなるでしょう。期待しています。
――圃場の基盤や農道の整備でも課題はありますか。
飯田:現状のレベル2のアグリロボトラクタでは、あぜ際は人が運転して作業をしなければならず、これを無人でやるのは難しい。なぜならあぜ際には土管などの障害物があったりします。さらに無人化を進めるなら、圃場の基盤整備も必要です。レベル3(完全無人化)で農道を無人走行させるなら、その農道を整備する必要があります。現在の農道は無人農機が通れる状態ではないことも多いですから。
<参考URL>
株式会社クボタ
みちびき(準天頂衛星システム:QZSS)公式サイト - 内閣府
<これまでの連載はこちら>
クボタが描くスマート農業の未来<上>「目指すはPDCA型農業」〜飯田聡特別技術顧問に聞くクボタが描くスマート農業の未来<中>「最終目標は高度営農支援システムの構築」〜飯田聡特別技術顧問に聞く
株式会社クボタ 特別技術顧問の飯田聡氏――農林水産省は2020年までに遠隔監視での完全無人システム(レベル3)を実現すると宣言しています。2年後ですが、実現に当たってどんな課題がありますか。
飯田:まず言いたいのは、完全無人化の定義をはっきりしなければいけないということ。無人化の対象に圃場間移動をするための公道走行を含むのか、専用の農道に限定するのかでメーカーにとっては開発の難易度がものすごく違ってくるんです。
もう一つ重要なのは、遠隔監視とはどんな形態なのかということ。たとえば10km四方に田んぼが点在しているとして、すべてを農家の事務所のモニターで監視するのか、それとも1km範囲内で隣接する圃場を移動型監視車両で遠隔監視するのか? どちらを指すかで開発の難易度も違うんですよ。
――遠隔監視するためには通信の問題も残っていますね。
飯田:ええ、たとえば2.4GHzのWi-Fiは200m程度しか電波を飛ばせない。広範囲の遠隔監視をするためには農村で大量かつ高速にデータを流すインフラ(5Gなど)が必要になりますし、今の電波法の規制緩和も必要になるかもしれません。
それから道路走行も厄介な問題です。車の自動運転や安全運転支援システムに必要となる高精度の3次元情報を持つデジタル地図を「ダイナミックマップ」と呼んでいますが、そういう情報を取り込みながら道路走行する、自動車の無人走行技術が必要になります。
また、トラクターの作業機械を装着しての道路走行は法的に禁じられています。こうした法的規制が緩和されたり技術的な課題が克服できないと、2020年に無人化するといっても、その範囲はかなり限定的になるでしょう。
資料提供:株式会社クボタ
――無人化の定義があいまいで、なおかつ障害も多い中、御社としてロボット農機の開発はどこまで進めていますか。
飯田:農水省は農機の無人化・自動化のレベルを3段階に分けています。レベル1に相当するオートステアリング(自動操舵)では、すでに直進機能付きの田植機やトラクターを普及させています。現在は、レベル2の有人監視の下での無人化や自動化の実現に向けて、トラクター・田植機・コンバインなどを活用した周年作業の自動化を目指して研究開発を進めています。
その第1弾として2017年6月から、「アグリロボトラクタ」をモニター販売しました。このトラクターは単独での無人走行のみならず、2台での協調運転ができるようになっています。さらに、このトラクターには安全機能を備えさせ、レーザースキャナーやソナーなどで障害物を感知し停止するようにしました。これは農水省の「農業機械の自動走行に関する安全性確保ガイドライン」や策定中のISO基準に沿っています。
ただ、これはある程度の平地で作業することを前提にしているんですね。畑作だとかなりの傾斜地で作業することもあり、作業機は色々な種類があってその形態が複雑。そうした様々な状況に対応できるようにするには、さらに時間をかけていかなければなりません。
資料提供:株式会社クボタ
もう一つ、アグリロボトラクタについては、「効率がどれくらい上がったか」と聞かれることがあります。もちろん効率は大事なんですが、とにかく働き手がおらず農繁期の忙しい時に、農家のみなさんの働き方改革に役立つというのが大きいです。就農したばかりの人がすぐにトラクターを使いこなせ、農業に対する希望をもってもらえる点にも目を向けて欲しいです。ですから、当面私どもはレベル2の農機の開発と普及に力を入れていきたいと思います。
――2018年11月に運用開始が決まっている日本発の衛星利用システム「準天頂衛星」についてはどう思われますか。
飯田:現時点で既存のRTK-GNSSと比べるとやや精度が下がると言われています。それなら作業にどのくらい影響するのか。大きく影響するのであれば、補完的な技術を考えないといけない。価格について言えば、衛星から補正信号をもらうので、RTK-GNSSと違って基地局を立てる必要がない分、安価にもなるでしょう。期待しています。
――圃場の基盤や農道の整備でも課題はありますか。
飯田:現状のレベル2のアグリロボトラクタでは、あぜ際は人が運転して作業をしなければならず、これを無人でやるのは難しい。なぜならあぜ際には土管などの障害物があったりします。さらに無人化を進めるなら、圃場の基盤整備も必要です。レベル3(完全無人化)で農道を無人走行させるなら、その農道を整備する必要があります。現在の農道は無人農機が通れる状態ではないことも多いですから。
<参考URL>
株式会社クボタ
みちびき(準天頂衛星システム:QZSS)公式サイト - 内閣府
【特集】クボタが描くスマート農業の未来
- 農機の無人化に向けた現状と課題 ~クボタ・飯田聡特別技術顧問に聞く【第3回】
- 最終目標は高度営農支援システム〜クボタ・飯田聡特別技術顧問に聞く【第2回】
- 目指すはPDCA型農業 〜クボタ・飯田聡特別技術顧問に聞く【第1回】
-
スマート農業で「移植の田植え」が変わる! 移植栽培の効率化のコツ
SMART AGRI編集部
-
ネギ防除の負担、どう見直す? ──慣行防除とドローン防除を徹底比較
SMART AGRI編集部
-
本当の意味で農業が楽になる? 「フィジカルAI」とは何か ──社会の変化と農業への接点
SMART AGRI編集部
-
なぜ今「スマート農業」をドラマに? 『ゲームチェンジ』仕掛け人が描く農業と人の物語
SMART AGRI編集部
-
中沢元紀×石川恋が語る“スマート農業”の可能性 ──ドラマ「ゲームチェンジ」記者発表会レポート
SMART AGRI編集部
-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム

-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム


SHARE







































