

AI農薬散布ロボットによってユリの農薬使用量50%削減へ【生産者目線でスマート農業を考える 第15回】
こんにちは。日本農業サポート研究所の福田浩一です。
前回は「農産物ECでの花き輸送中の課題がデータロガーで明らかに!」と題して、データロガーによってユリ配送中の衝撃など、トラブルを見える化する事例を紹介させていただきました。
今回は、前回に続いて有限会社エフ・エフ・ヒライデで行われている令和3年「スマート農業実証プロジェクト」の実証試験のうち、AI搭載の門型防除用走行ロボットによる自動予察と薬剤散布を取り上げます。
ユリの球根はオランダ等の生産国から輸入されています。以前は球根の消毒として1990年代から市場に出回り、世界でもっとも広く利用されている「ネオニコチノイド系」の殺虫剤を使用していましたが、昨今の環境負荷低減の考えから使用されなくなっています。
これにより、ユリ切り花生産の現場においてアブラムシが頻発し、アブラムシ自体の吸汁による汚損のほか、排泄物に付着する糸状菌によるスス病の発生で商品性が損なわれることが近年大きな問題となっています。
 アブラムシが発生したユリ(平出賢司さん提供)
アブラムシが発生したユリ(平出賢司さん提供)
これらの防除には予察がもっとも重要ですが、人の目による予察は見落としの可能性があり、確実性に欠けます。また予察に割く作業時間は、全体の労務時間を圧迫します。
さらに散布作業においても、オランダでの薬剤散布減少に伴うアブラムシの発生回数の増加から薬剤コストが上昇。農薬の被曝機会の増加に繋がり、2020年にエフ・エフ・ヒライデで使用したアブラムシ殺虫剤の合計は重量で35,800g、2016年実績の10,675gのおよそ3倍となっていました。
そこで、予察および防除にAIと連携した門型ロボットを導入してスマート化し、効率的な防除体系を確立して薬剤コストの低減を図ることにしました。これは、前回紹介したデータロガーを含め4つのスマート技術のうちの一つです。
この技術は、AIの予察精度向上により約20%の予防的防除と、約30%の発生後防除の回数削減を目指しています。ピンポイントでの部分散布をすることで、総合的に薬剤量の削減50%が目標です。
2021年9月2日(木)エフ・エフ・ヒライデの第2圃場(実証圃場)にて、門型ロボットの走行性とAIとの連携を確認するため、現地試験が行われました。
エフ・エフ・ヒライデのほか、株式会社farmo、株式会社イーエムアイ・ラボ、栃木県農政部経営技術課、栃木県農業試験場、宇都宮市役所、日本農業サポート研究所(弊社)など関係者が集まり、門型ロボットの走行試験を見守りました。
門型ロボットの開発を担当した株式会社イーエムアイ・ラボ 技術顧問荒井克人さんによると、重量は約80㎏。現状では大人が4人程度いないとトラックからハウスまで移動等が難しいようです。
 トラックから門型ロボットを運び出す様子(弊社撮影)
トラックから門型ロボットを運び出す様子(弊社撮影)
エフ・エフ・ヒライデ代表の平出賢司さんは「従来は実証ハウス(2,880㎡)だと、アブラムシ頻発期は週1~2回500ℓぐらい散布していました」とその頻度の多さと散布量について危惧していました。
下の画像のように、門型ロボットの農薬用タンクは10ℓタイプを2つセットできます。今回、このロボットは2秒で約50㎝移動し、茎葉を撮影。そのデータをクラウドに上げて、AIシステムがアブラムシの有無を判断し、いることがわかれば2秒噴霧するように設定しました(設定は自由に変更可能)。
門型ロボットは、50㎝進む間に「移動→停止→撮影→AIサーバへ送信→AI判断→門型ロボットへ指令→噴霧」の動作サイクルを連続して行い、ほぼ問題なく実行できることを確認できました。ただし、1サイクルの所要時間はネット環境が不安定な場所があったようで同じではありませんでした。
AI部分を開発しているのは、コンソーシアムメンバーの株式会社ノーザンシステムサービスです。AIには、エフ・エフ・ヒライデの圃場で撮影された数百枚のアブラムシがいる画像と、いない画像を学習させました。走行していた門型ロボットが停止した際に搭載した2つのカメラでユリの茎葉部分を撮影し、アブラムシがいるかどうかを判断できるようにしています。
 門型ロボット全体像(イーエムアイ・ラボ提供)
門型ロボット全体像(イーエムアイ・ラボ提供)
 自動で農薬散布するロボット ※ユリの成長が進んでいる畝(イーエムアイ・ラボ提供)
自動で農薬散布するロボット ※ユリの成長が進んでいる畝(イーエムアイ・ラボ提供)
 自動で農薬散布するロボット ※ユリが成長途中の畝(イーエムアイ・ラボ提供)
自動で農薬散布するロボット ※ユリが成長途中の畝(イーエムアイ・ラボ提供)
走行性については、現状このロボットには対物センサーやRTKなどは装備されていません。しかし、畝間がほぼ同じ幅でまっすぐに整備されているうえ、この日は地面が乾いていました。タイヤはスパイク状になっており、スリップすることもなくほぼ問題なく直進していました。
 ロボットの車輪(弊社撮影)
ロボットの車輪(弊社撮影)
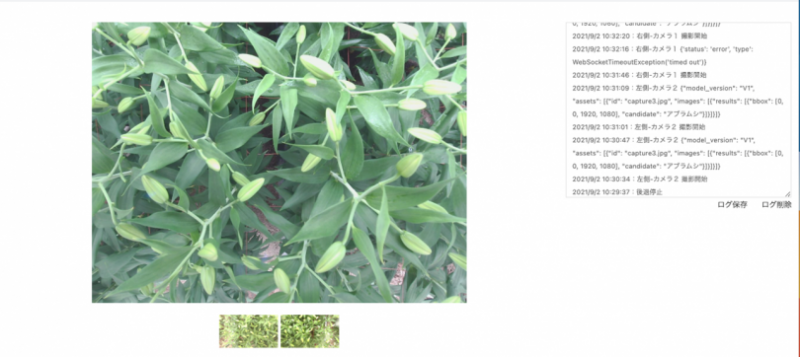 カメラが撮影した画像 ※ユリの成長が進んでいる畝(イーエムアイ・ラボ提供)
カメラが撮影した画像 ※ユリの成長が進んでいる畝(イーエムアイ・ラボ提供)
今回の走行試験を通じて、以下のような、今後の課題も明らかになってきました。
今はまだ、門型ロボットは自動停止できません。カメラでユリの茎葉がとらえられなくなったら、畝がなくなったとAIに判定させ、散布終了と認識させるなどの方法を採用する予定です。
まだ課題はあるものの、一度ロボットが走り出すとまっすぐな畝間に沿って自動で農薬散布します。ロボットが農薬散布している間、生産者は他の作業ができると見込んでいます。
平出賢司さんは「従来の初期防除はスタッフが圃場をくまなく歩き、アブラムシを見つけてはスプレーで防除していました。この作業は時間もかかり、農薬の被爆が心配でした。しかし、ロボットが自動で行うと、作業が軽減する可能性があります」と、今後の改善に期待しています。
価格はAI部分も含めると、高めの価格設定になると予想されます。エフ・エフ・ヒライデのように大規模花き法人であれば、コストを回収できるかもしれません。しかし、中小の花き農家にはこのコストは負担になるでしょう。
まず、エフ・エフ・ヒライデのような大規模のユリ農家への導入が現実的と思われます。いずれにしても、AIと門型ロボットの組み合わせで、環境負荷を軽減できるこの技術にさらなる改善が行われ、実用化することが期待されます。今後の改善状況については、また機会があればこのコーナーで紹介していきたいと思っています。
有限会社エフ・エフ・ヒライデ
https://www.ffhiraide.net/
株式会社イーエムアイ・ラボ
https://emi-lab.jp/
株式会社ノーザンシステムサービス
https://www.nssv.co.jp/
前回は「農産物ECでの花き輸送中の課題がデータロガーで明らかに!」と題して、データロガーによってユリ配送中の衝撃など、トラブルを見える化する事例を紹介させていただきました。
今回は、前回に続いて有限会社エフ・エフ・ヒライデで行われている令和3年「スマート農業実証プロジェクト」の実証試験のうち、AI搭載の門型防除用走行ロボットによる自動予察と薬剤散布を取り上げます。
今回の事例:栃木県宇都宮市のAI搭載の門型ロボットによる薬剤量削減
薬剤散布の労務コスト・農薬コストの上昇
ユリの球根はオランダ等の生産国から輸入されています。以前は球根の消毒として1990年代から市場に出回り、世界でもっとも広く利用されている「ネオニコチノイド系」の殺虫剤を使用していましたが、昨今の環境負荷低減の考えから使用されなくなっています。
これにより、ユリ切り花生産の現場においてアブラムシが頻発し、アブラムシ自体の吸汁による汚損のほか、排泄物に付着する糸状菌によるスス病の発生で商品性が損なわれることが近年大きな問題となっています。
アブラムシが発生したユリ(平出賢司さん提供)これらの防除には予察がもっとも重要ですが、人の目による予察は見落としの可能性があり、確実性に欠けます。また予察に割く作業時間は、全体の労務時間を圧迫します。
さらに散布作業においても、オランダでの薬剤散布減少に伴うアブラムシの発生回数の増加から薬剤コストが上昇。農薬の被曝機会の増加に繋がり、2020年にエフ・エフ・ヒライデで使用したアブラムシ殺虫剤の合計は重量で35,800g、2016年実績の10,675gのおよそ3倍となっていました。
そこで、予察および防除にAIと連携した門型ロボットを導入してスマート化し、効率的な防除体系を確立して薬剤コストの低減を図ることにしました。これは、前回紹介したデータロガーを含め4つのスマート技術のうちの一つです。
この技術は、AIの予察精度向上により約20%の予防的防除と、約30%の発生後防除の回数削減を目指しています。ピンポイントでの部分散布をすることで、総合的に薬剤量の削減50%が目標です。
アブラムシがいるかどうかをAI搭載門型ロボットが判断
2021年9月2日(木)エフ・エフ・ヒライデの第2圃場(実証圃場)にて、門型ロボットの走行性とAIとの連携を確認するため、現地試験が行われました。
エフ・エフ・ヒライデのほか、株式会社farmo、株式会社イーエムアイ・ラボ、栃木県農政部経営技術課、栃木県農業試験場、宇都宮市役所、日本農業サポート研究所(弊社)など関係者が集まり、門型ロボットの走行試験を見守りました。
門型ロボットの開発を担当した株式会社イーエムアイ・ラボ 技術顧問荒井克人さんによると、重量は約80㎏。現状では大人が4人程度いないとトラックからハウスまで移動等が難しいようです。
トラックから門型ロボットを運び出す様子(弊社撮影)エフ・エフ・ヒライデ代表の平出賢司さんは「従来は実証ハウス(2,880㎡)だと、アブラムシ頻発期は週1~2回500ℓぐらい散布していました」とその頻度の多さと散布量について危惧していました。
下の画像のように、門型ロボットの農薬用タンクは10ℓタイプを2つセットできます。今回、このロボットは2秒で約50㎝移動し、茎葉を撮影。そのデータをクラウドに上げて、AIシステムがアブラムシの有無を判断し、いることがわかれば2秒噴霧するように設定しました(設定は自由に変更可能)。
門型ロボットは、50㎝進む間に「移動→停止→撮影→AIサーバへ送信→AI判断→門型ロボットへ指令→噴霧」の動作サイクルを連続して行い、ほぼ問題なく実行できることを確認できました。ただし、1サイクルの所要時間はネット環境が不安定な場所があったようで同じではありませんでした。
AI部分を開発しているのは、コンソーシアムメンバーの株式会社ノーザンシステムサービスです。AIには、エフ・エフ・ヒライデの圃場で撮影された数百枚のアブラムシがいる画像と、いない画像を学習させました。走行していた門型ロボットが停止した際に搭載した2つのカメラでユリの茎葉部分を撮影し、アブラムシがいるかどうかを判断できるようにしています。
門型ロボット全体像(イーエムアイ・ラボ提供)自動で農薬散布するロボット ※ユリの成長が進んでいる畝(イーエムアイ・ラボ提供)自動で農薬散布するロボット ※ユリが成長途中の畝(イーエムアイ・ラボ提供)走行性については、現状このロボットには対物センサーやRTKなどは装備されていません。しかし、畝間がほぼ同じ幅でまっすぐに整備されているうえ、この日は地面が乾いていました。タイヤはスパイク状になっており、スリップすることもなくほぼ問題なく直進していました。
ロボットの車輪(弊社撮影)カメラが撮影した画像 ※ユリの成長が進んでいる畝(イーエムアイ・ラボ提供)今後の課題と所感
今回の走行試験を通じて、以下のような、今後の課題も明らかになってきました。
- モバイル回線使用のため通信の安定性を改善する必要がある
- 現状、一畝終わると手動で門型ロボットを隣の畝に移動させるしかない
今はまだ、門型ロボットは自動停止できません。カメラでユリの茎葉がとらえられなくなったら、畝がなくなったとAIに判定させ、散布終了と認識させるなどの方法を採用する予定です。
まだ課題はあるものの、一度ロボットが走り出すとまっすぐな畝間に沿って自動で農薬散布します。ロボットが農薬散布している間、生産者は他の作業ができると見込んでいます。
平出賢司さんは「従来の初期防除はスタッフが圃場をくまなく歩き、アブラムシを見つけてはスプレーで防除していました。この作業は時間もかかり、農薬の被爆が心配でした。しかし、ロボットが自動で行うと、作業が軽減する可能性があります」と、今後の改善に期待しています。
価格はAI部分も含めると、高めの価格設定になると予想されます。エフ・エフ・ヒライデのように大規模花き法人であれば、コストを回収できるかもしれません。しかし、中小の花き農家にはこのコストは負担になるでしょう。
まず、エフ・エフ・ヒライデのような大規模のユリ農家への導入が現実的と思われます。いずれにしても、AIと門型ロボットの組み合わせで、環境負荷を軽減できるこの技術にさらなる改善が行われ、実用化することが期待されます。今後の改善状況については、また機会があればこのコーナーで紹介していきたいと思っています。
本実証課題は、農林水産省「スマート農業実証プロジェクト(課題番号:花3C1リ、実証課題名:ポストコロナに対応した切り花のスマート農業技術生産および商流による「スマートリリー」ビジネスモデルの実証、事業主体:国立研究開発法人農業・食品産業技術総合研究機構)」の支援により実施されています。
有限会社エフ・エフ・ヒライデ
https://www.ffhiraide.net/
株式会社イーエムアイ・ラボ
https://emi-lab.jp/
株式会社ノーザンシステムサービス
https://www.nssv.co.jp/
【連載】“生産者目線”で考えるスマート農業
- 世界有数の農産物輸出国、タイの農業現場から見える “スマートな農業経営”の現実【生産者目線でスマート農業を考える 第30回】
- アフリカのスマート農業はどうなっているのか? ギニアの農業専門家に聞きました【生産者目線でスマート農業を考える 第29回】
- 農業DXで先を行く台湾に学ぶ、スマート農業の現状【生産者目線でスマート農業を考える 第28回】
- スマート農業の本質は経営をスマートに考えること【生産者目線でスマート農業を考える 第27回】
- 肥料高騰のなか北海道で普及が進む「衛星画像サービス」の実効性【生産者目線でスマート農業を考える 第26回】
- 中山間地の稲作に本当に必要とされているスマート農業とは?【生産者目線でスマート農業を考える 第25回】
- 海外から注目される日本のスマート農業の強みとは?【生産者目線でスマート農業を考える 第24回】
- ロボットが常時稼働する理想のスマートリンゴ園の構築は可能か?【生産者目線でスマート農業を考える 第23回】
- 日本産野菜の輸出に関わるQRコードを使ったトレーサビリティの「見える化」【生産者目線でスマート農業を考える 第22回】
- インドネシアにおける農業の現状とスマート農業が求められている理由【生産者目線でスマート農業を考える 第21回】
- みかんの家庭選果時間を50%削減する、JAみっかびのAI選果【生産者目線でスマート農業を考える 第20回】
- スマート農業を成功させる上で生産者が考えるべき3つのこと【生産者目線でスマート農業を考える 第19回】
- 生産者にとって本当に役立つ自動灌水、自動換気・遮光システムとは【生産者目線でスマート農業を考える 第18回】
- JAみっかびが地域で取り組むスマート農業“環境計測システム”とは? 【生産者目線でスマート農業を考える 第17回】
- スマート農機の導入コストを大幅に下げる、日本の「農業コントラクター事業」普及・拡大の展望 【生産者目線でスマート農業を考える 第16回】
- AI農薬散布ロボットによってユリの農薬使用量50%削減へ【生産者目線でスマート農業を考える 第15回】
- 農産物ECでの花き輸送中の課題がデータロガーで明らかに!【生産者目線でスマート農業を考える 第14回】
- ブドウ農園でのセンサー+自動換気装置に加えて必要な“ヒトの力”【生産者目線でスマート農業を考える 第13回】
- IoTカメラ&電気柵導入でわかった、中山間地での獣害対策に必要なこと【生産者目線でスマート農業を考える 第12回】
- 直進アシスト機能付き田植機は初心者でも簡単に使えるのか?【生産者目線でスマート農業を考える 第11回】
- 全国初! 福井県内全域をカバーするRTK固定基地局はスマート農業普及を加速させるか?【生産者目線でスマート農業を考える 第10回】
- キャベツ栽培を「見える化」へ導く「クロノロジー型危機管理情報共有システム」とは?【生産者目線でスマート農業を考える 第9回】
- ブロッコリー収穫機で見た機械化と栽培法との妥協方法【生産者目線でスマート農業を考える 第8回】
- コロナ禍で急速に進化するICT活用とスマート農業【生産者目線でスマート農業を考える 第7回】
- 徳島県のミニトマトハウスで見たスマート農業で、軽労化と高能率化を同時に実現する方法【生産者目線でスマート農業を考える 第6回】
- 若手後継者を呼び込むスマート農業【生産者目線でスマート農業を考える 第5回】
- 地上を走るドローンによるセンシングをサポートする普及指導員【生産者目線でスマート農業を考える 第4回】
- スマート農機は安くないと普及しない?【生産者目線でスマート農業を考える 第3回】
- 果樹用ロボットで生産者に寄り添うスマート農機ベンチャー【生産者目線でスマート農業を考える 第2回】
- 浜松市の中山間地で取り組む「スモールスマート農業」【生産者目線でスマート農業を考える 第1回】
-
夏の異常気象に備えるためのスマート農業技術 5選
SMART AGRI編集部
-
オプティム・ファームと栃木県の取り組みに学ぶ、農業DXに大切な考え方とは ──株式会社オプティム 代表取締役社長 菅谷俊二氏講演レポート
かくやさゆり
-
農業生産者の悩みにもっと寄り添うために──オプティム・ファームが目指す農業DXの次の一手
かくやさゆり
-
北海道のスマート農業を支える計量のプロ 効率化だけでなく付加価値の獲得も
山口亮子
-
いちごの輸出を拡大するスマート技術とは
窪田新之助
-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム

-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム


SHARE





































