

inahoのアスパラガス自動収穫ロボットの仕組みとは?──inaho株式会社(前編)
農業ロボットの開発を手がけるベンチャー企業、inaho株式会社の菱木豊社長と知り合ったのは2年前。当時開発を始めていたアスパラガスの自動収穫ロボットをいよいよ2019年からデビューさせるという。プロトタイプを実演してくれるというので、神奈川県鎌倉市にある事務所にうかがった。

JR鎌倉駅から車で南に向かうこと5分、海岸に面した材木座という閑静な住宅街にinahoはある。門を入った先にあるのは畑。その向こうに見えるのは、古民家を改装したと事前に聞いていた事務所のようだ。
約束の時間より早く到着したので門の前で待っていると、我々の姿を見つけたスタッフのひとりが出迎えてくれた。菱木さんは接客が長引いているとのことで、代わって現れた、設計と開発に携わるシニアテクニカルアーキテクトの外波山晋平さんが収穫ロボットによる自動収穫を実演してくれることになった。
場所は敷地内にある家庭菜園ほどの小さな畑。すでにプロトタイプが畝間に置いてある。畝間の端から端まで敷かれているのは白いテープ。ロボットの下腹部にあるカメラがこのテープを認識し、これに沿って走るようになっているそうだ。その左右の畝のところどころにはアスパラガスが立っている。といっても栽培しているわけではなく、買ってきたものを突き立ててあるとのこと。
 ▲白いラインが引かれた畝間を自動収穫ロボットが移動する
▲白いラインが引かれた畝間を自動収穫ロボットが移動する
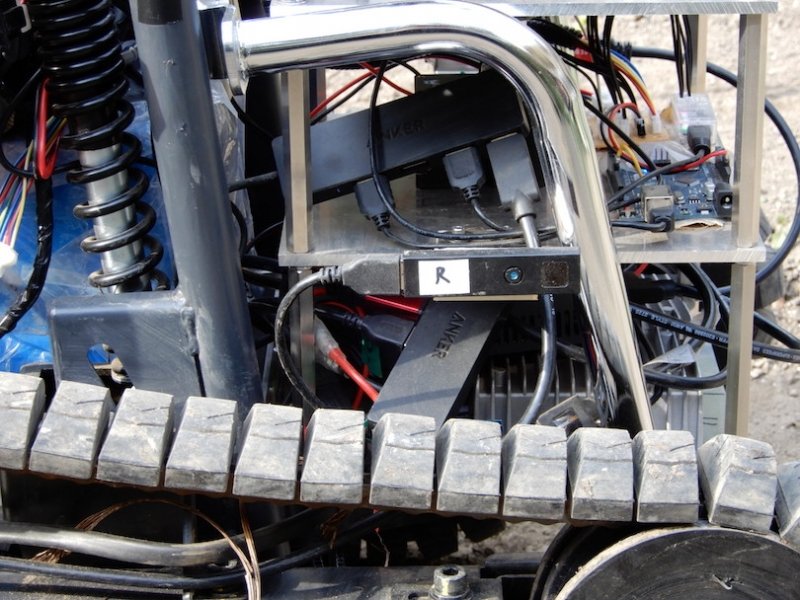 ▲駆動システムは電動車椅子がベース
▲駆動システムは電動車椅子がベース
外波山さんが本体のスイッチを押すと、ゆっくりと走り始めた。アスパラガスが立っている場所に来ると停車。続いてアームがそこに伸びていく。アームの先端は握り手になっている。そこでアスパラガスの根本をつかむと、すぐさま握り手の下に隠れているカッターで切断。そのまま荷台のコンテナに入れた後、アームを折りたたんでから、再びゆっくりと走り出した。
 ▲アーム下部にあるカッターで、つかんだアスパラガスを切る
▲アーム下部にあるカッターで、つかんだアスパラガスを切る
作業の様子をしばらく見ていると、アスパラガスがあっても停車しない場合があることに気づく。聞けば、「どの高さ以上のアスパラガスを収穫するのか、事前に設定できる」とのこと。背が低すぎれば、取らないで通り過ぎるのだ。
アスパラガスの存在をどうやって認識しているのか。本体の両側面に小型カメラがある。これが向こう約1メートルの空間を撮影し、AIによってアスパラガスの存在を見分けていく。
「アスパラガスを認識するうえで、主に使っているのは点群処理技術です。赤外線センサーで形を計測し、適正な長さのものだけをつかんで切り取る。要するに三次元の形状を見て判断するわけです」
まずはロボットが収穫していく。とはいえ完璧ではない。取り残した分は人の出番。サービスを開始したら、利用する農家はスマホアプリ上の圃場マップで取り残しの箇所が確認できるようにする。収穫はロボットが9割、残り1割を人が行うイメージを持つ。
プロトタイプの運搬能力は最大40kg、本体重量は現在70kgだが、来月できる2号機は本体重量が40kgと軽くなり、積載重量は平地の場合だと60kg以上になる予定。実用化した際には、ロボットが収穫物を満杯に積んだら、ハウスの外に出てきて、農家のスマホなどに通知が届くようになる計画だ。
今回の取材には金子農園(横浜市青葉区)の金子栄治さんが同行した。アスパラガスを作った経験があるというので、まずはその収穫の大変さについて尋ねた。
「しゃがみながらの作業なので筋肉痛になります。タイヤが付いた台車で座って作業もできるけど、収穫するのに右を向いたり左を向いたりしなければならず、そのうち背中が痛くなってきますね」
収穫がロボット化されることについては次のように語った。
「うちは山の斜面に2ヘクタールの農地があるのですが、こういうロボットがあれば、そこにアスパラガスのような経済作物を植えることも考えられます」
 ▲inahoの外波山晋平さん(左)と金子農園の金子栄治さん
▲inahoの外波山晋平さん(左)と金子農園の金子栄治さん
このロボットの実証試験をしている佐賀県や栃木県では、アスパラガスの収穫期間は一般的に2月から10月まで。この間、農家は全労働時間の半分以上を収穫と調製に当てている。しかもアスパラガスは地面の際に生えているので、想像するだけでその作業は大変だ。農家の平均年齢が70歳に迫る中、収穫のつらさは離農する大きな理由になっている。
最も大変な作業を人に代わってロボットが担えれば、離農を防ぎ、ひいては産地を維持できるかもしれない。inahoはその思いを持って今年、自動収穫ロボットの実用化に動き出す。次回はその普及の方法についてふれていきたい。
<参考URL>
inaho株式会社
JR鎌倉駅から車で南に向かうこと5分、海岸に面した材木座という閑静な住宅街にinahoはある。門を入った先にあるのは畑。その向こうに見えるのは、古民家を改装したと事前に聞いていた事務所のようだ。
約束の時間より早く到着したので門の前で待っていると、我々の姿を見つけたスタッフのひとりが出迎えてくれた。菱木さんは接客が長引いているとのことで、代わって現れた、設計と開発に携わるシニアテクニカルアーキテクトの外波山晋平さんが収穫ロボットによる自動収穫を実演してくれることになった。
場所は敷地内にある家庭菜園ほどの小さな畑。すでにプロトタイプが畝間に置いてある。畝間の端から端まで敷かれているのは白いテープ。ロボットの下腹部にあるカメラがこのテープを認識し、これに沿って走るようになっているそうだ。その左右の畝のところどころにはアスパラガスが立っている。といっても栽培しているわけではなく、買ってきたものを突き立ててあるとのこと。
▲白いラインが引かれた畝間を自動収穫ロボットが移動する点群処理技術でアスパラガスの形状を認識
プロトタイプはざっと見たところ、上部にはアームや小型カメラのほか、配線やバッテリーがいろいろとむき出しになっている。走行部はクローラー式になっているが、これは電動車椅子を改造したものだという。▲駆動システムは電動車椅子がベース外波山さんが本体のスイッチを押すと、ゆっくりと走り始めた。アスパラガスが立っている場所に来ると停車。続いてアームがそこに伸びていく。アームの先端は握り手になっている。そこでアスパラガスの根本をつかむと、すぐさま握り手の下に隠れているカッターで切断。そのまま荷台のコンテナに入れた後、アームを折りたたんでから、再びゆっくりと走り出した。
▲アーム下部にあるカッターで、つかんだアスパラガスを切る作業の様子をしばらく見ていると、アスパラガスがあっても停車しない場合があることに気づく。聞けば、「どの高さ以上のアスパラガスを収穫するのか、事前に設定できる」とのこと。背が低すぎれば、取らないで通り過ぎるのだ。
アスパラガスの存在をどうやって認識しているのか。本体の両側面に小型カメラがある。これが向こう約1メートルの空間を撮影し、AIによってアスパラガスの存在を見分けていく。
「アスパラガスを認識するうえで、主に使っているのは点群処理技術です。赤外線センサーで形を計測し、適正な長さのものだけをつかんで切り取る。要するに三次元の形状を見て判断するわけです」
収穫作業は、ロボットが9割、人が1割
現在開発されているさまざまな農業ロボットの多くは、作業精度を人間並みにするのではなく、人と協調しながら仕事をこなすことが前提となっている。それはこのロボットも同じ。まずはロボットが収穫していく。とはいえ完璧ではない。取り残した分は人の出番。サービスを開始したら、利用する農家はスマホアプリ上の圃場マップで取り残しの箇所が確認できるようにする。収穫はロボットが9割、残り1割を人が行うイメージを持つ。
プロトタイプの運搬能力は最大40kg、本体重量は現在70kgだが、来月できる2号機は本体重量が40kgと軽くなり、積載重量は平地の場合だと60kg以上になる予定。実用化した際には、ロボットが収穫物を満杯に積んだら、ハウスの外に出てきて、農家のスマホなどに通知が届くようになる計画だ。
今回の取材には金子農園(横浜市青葉区)の金子栄治さんが同行した。アスパラガスを作った経験があるというので、まずはその収穫の大変さについて尋ねた。
「しゃがみながらの作業なので筋肉痛になります。タイヤが付いた台車で座って作業もできるけど、収穫するのに右を向いたり左を向いたりしなければならず、そのうち背中が痛くなってきますね」
収穫がロボット化されることについては次のように語った。
「うちは山の斜面に2ヘクタールの農地があるのですが、こういうロボットがあれば、そこにアスパラガスのような経済作物を植えることも考えられます」
▲inahoの外波山晋平さん(左)と金子農園の金子栄治さんこのロボットの実証試験をしている佐賀県や栃木県では、アスパラガスの収穫期間は一般的に2月から10月まで。この間、農家は全労働時間の半分以上を収穫と調製に当てている。しかもアスパラガスは地面の際に生えているので、想像するだけでその作業は大変だ。農家の平均年齢が70歳に迫る中、収穫のつらさは離農する大きな理由になっている。
最も大変な作業を人に代わってロボットが担えれば、離農を防ぎ、ひいては産地を維持できるかもしれない。inahoはその思いを持って今年、自動収穫ロボットの実用化に動き出す。次回はその普及の方法についてふれていきたい。
<参考URL>
inaho株式会社
【事例紹介】スマート農業の実践事例
- きゅうりの国内最多反収を達成し、6年目を迎えた「ゆめファーム全農SAGA」が次に目指すこと
- 豪雨を乗り越えてキュウリの反収50トンを実現した、高軒高ハウスでの養液栽培メソッド
- 2024年度に市販化予定のJA阿蘇「いちごの選果ロボット」はどこまできたか
- リーフレタスを露地栽培比で80倍生産できる「ガラス温室」の革命 〜舞台ファーム(仙台市)
- ロボトラでの「協調作業」提案者の思いと大規模化に必要なこと 〜北海道・三浦農場
- 大規模畑作の経営者が“アナログなマニュアル化”を進める理由 〜北海道・三浦農場
- 女性だけのドローンチームが農薬散布を担う! 新潟県新発田市の「スマート米」生産者による新たな取り組み
- 野菜の「美味しさ」につなげるためのスマート農業の取り組み〜中池農園(前編)
- ドローン自動飛行&播種で打込条播! アシスト二十一&オプティムが挑む新栽培技術の現状
- 22haの果樹経営で「最も機械化を果たした」青森県のリンゴ農家(前編)
- 優れた農業経営者は産地に何をもたらすのか〜固形培地は規模拡大への備え(後編)
- 優れた農業経営者は産地に何をもたらすのか〜キュウリで反収44tを達成した佐賀の脱サラ農家(前編)
- 耕地面積の7割が中山間地の大分県で、なぜスマート農業がアツいのか
- 農業法人で穀粒判別器を導入した理由 〜新型は政府備蓄米で利あり
- 大分高専と組んで「芽かきロボット」を開発する菊農家
- スマホひとつで気孔の開度を見える化し灌水に活用する「Happy Quality」の技術
- 目視外補助者なしでのドローン飛行の現実度【オプティムの飛行実証事例レポート】
- 「自動飛行ドローン直播技術」をわずか2年で開発できた理由【石川県×オプティムの取り組み 後編】
- 自動飛行ドローンによる水稲直播 × AI解析ピンポイント農薬散布に世界で初めて成功!【石川県×オプティムの取り組み 前編】
- 300haの作付を1フライトで確認! 固定翼ドローン「OPTiM Hawk」目視外自動飛行実験レポート
- スマート米 玄米でクラフトビールを醸造!? 青森でのスマート農業×地産都消の取り組み
- 宇宙から稲の生育を監視し、可変施肥で最高品質の「山田錦」を目指す
- 農業関係者がスマート農業事例を交流するFacebookコミュニティ「明るく楽しく農業ICTを始めよう! スマート農業 事例集」とは?
- 日本のフェノミクス研究は「露地栽培」分野で【ゲノム編集研究の発展とフェノミクス(後編)】
- 農業における「フェノミクス」の意義とは? ゲノム編集研究の発展とフェノミクス(前編)
- 糖度と大きさのバランスを制御して“トマトの新基準”を打ち立てたい──AIでつくる高糖度トマト(後編)
- 「経験と勘」に頼らない安定的なトマトの生産を目指して──AIでつくる高糖度トマト(前編)
- 【スマート農業×ドローン】2機同時の自動航行で短時間で農薬散布──DJI×シンジェンタ実証実験レポート
- 画像認識とAIで柑橘の腐敗を選別、防止──愛媛県のスマート農業事例
- 農業ICTやロボットを取り入れるべき農家の規模とは──有限会社フクハラファーム
- ICTで大規模稲作経営の作業時間&効率を改善──有限会社フクハラファーム
- 農家のスマート農業導入を支援する全国組織を──株式会社ヤマザキライス(後編)
- 農家が求める水田センサーを農家自ら企画──株式会社ヤマザキライス(前編)
- inahoのアスパラガス自動収穫ロボットの仕組みとは?──inaho株式会社(前編)
- シニアでも使える農業IoTを実現するためには?──山梨市アグリイノベーションLabの取り組み
- 農業参入企業が共通課題を解決する、北杜市農業企業コンソーシアムの実践<下>
- 中玉トマトで国内トップの反収を上げる最先端園芸施設──北杜市農業企業コンソーシアムの実践<上>
- 農家がグーグルのAIエンジン「Tensor Flow」でキュウリの自動選果を実現
-
スマート農業で「移植の田植え」が変わる! 移植栽培の効率化のコツ
SMART AGRI編集部
-
ネギ防除の負担、どう見直す? ──慣行防除とドローン防除を徹底比較
SMART AGRI編集部
-
本当の意味で農業が楽になる? 「フィジカルAI」とは何か ──社会の変化と農業への接点
SMART AGRI編集部
-
なぜ今「スマート農業」をドラマに? 『ゲームチェンジ』仕掛け人が描く農業と人の物語
SMART AGRI編集部
-
中沢元紀×石川恋が語る“スマート農業”の可能性 ──ドラマ「ゲームチェンジ」記者発表会レポート
SMART AGRI編集部
-
AI×ドローンで栽培した安心安全な「スマート米」、味わってみませんか
PR 株式会社オプティム

-
玄米食に安心な「スマート玄米」は、残留農薬不検出の安全なお米です
PR 株式会社オプティム


SHARE






































